Multi Arm Robot for Colon Surgery
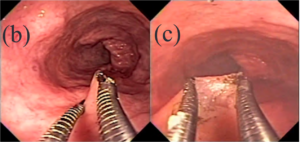
This project focuses on the development of a bimanual concentric push-pull robot for endoscopic submucosal dissection (ESD). ESD is currently not widely adopted because it is very challenging with existing tools. By constructing small, dexterous, flexible manipulators, we can provide surgeons with an easier way to complete complex and technically demanding procedures endoscopically.
This robot leverages concentric push-pull technology, which enables active bending of small tubes (down to less than a mm in diameter) while keeping an actuation unit outside the body. The project centers on the design and modeling of these tools, the ways we can effectively actuate them, and integration of teleoperation capabilities.
Related Publications
Conference Papers:
, “Computational Analysis of Design Parameters for a Bimanual Concentric Push-Pull Robot”, Hamlyn Symposium on Medical Robotics, 2023.