Curing Epilepsy with No Incisions
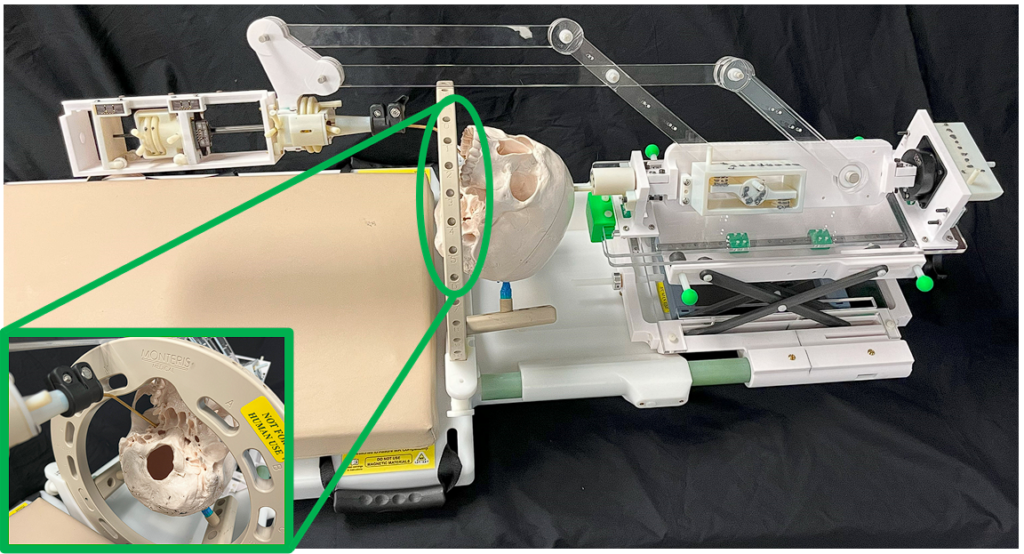
An MRI compatible, pneumatically actuated robotic system with 5-DOF arm to position the steerable needle and 2-DOF module to deploy the needle and fiber probe. Inset shows how the needle enters the brain through a natural opening in the cheek.
Epilepsy can be cured using laser thermal therapy to ablate the hippocampus, the region of the brain where the seizures originate from. Existing straight and rigid tools to deploy the laser probe have limited dexterity to target the curved shape of the hippocampus, and require drilling through the skull.
This project focuses on providing a minimally invasive way to achieve the benefits of surgery without opening the skull, through use of a steerable needle delivered through the patient’s cheek. The steerable needle can better match the curved shape of the hippocampus and deliver the thermal therapy while being monitored in real time using MR imaging. To achieve this, we are developing an MRI-compatible robotic platform that aims and deploys the steerable needle and laser probe, powered entirely using 3D printed pneumatic motors which are inherently non-magnetic.
Publications:
- Comber DB, Slightam JE, Gervasi VR, Neimat JS, Barth EJ. Design, Additive Manufacture, and Control of a Pneumatic MR-Compatible Needle Driver. IEEE transactions on robotics. 2016;32(1):138-149. doi:10.1109/TRO.2015.2504981
- , “Robotic Curvilinear Laser Thermal Therapy Probe for Transforamenal Hippocampotomy”, in Hamlyn Symposium on Medical Robotics, 2022.
- , “Design Considerations for Robotic, MRI-Guided, Trans-Foramen Ovale Access to the Brain”, in SPIE Medical Imaging, 2023.
- , “A Highly Compact, Multi-Material, Fluid Powered Actuation System For MRI-Guided Surgical Intervention”, in Symposium on Fluid Power and Motion Control, 2023.