Robotic intervention platform for older adults with mild cognitive impairment and dementia
Personnel: Jing Fan
Goals/Objectives:
The primary goal is to develop a novel robotic intervention platform and environment, specifically designed to engage the attention and participation of older adults, with or without cognitive impairments, in social, physical, and cognitive activities.
Outline:
The aging population with its concomitant medical conditions, physical and cognitive impairments, at a time of strained resources, establishes the urgent need to explore advanced technologies that may enhance function and quality of life. Socially assistive robotic (SAR) systems have the advantage of embedding novel quantitative metrics, sensor-based non-invasive methodologies, incorporating physical movement into realistically embodied interactions, and meaningfully responding to pivotal aspects of human engagement and behavior, and thus has substantial promise for impacting function and engagement of older adults.
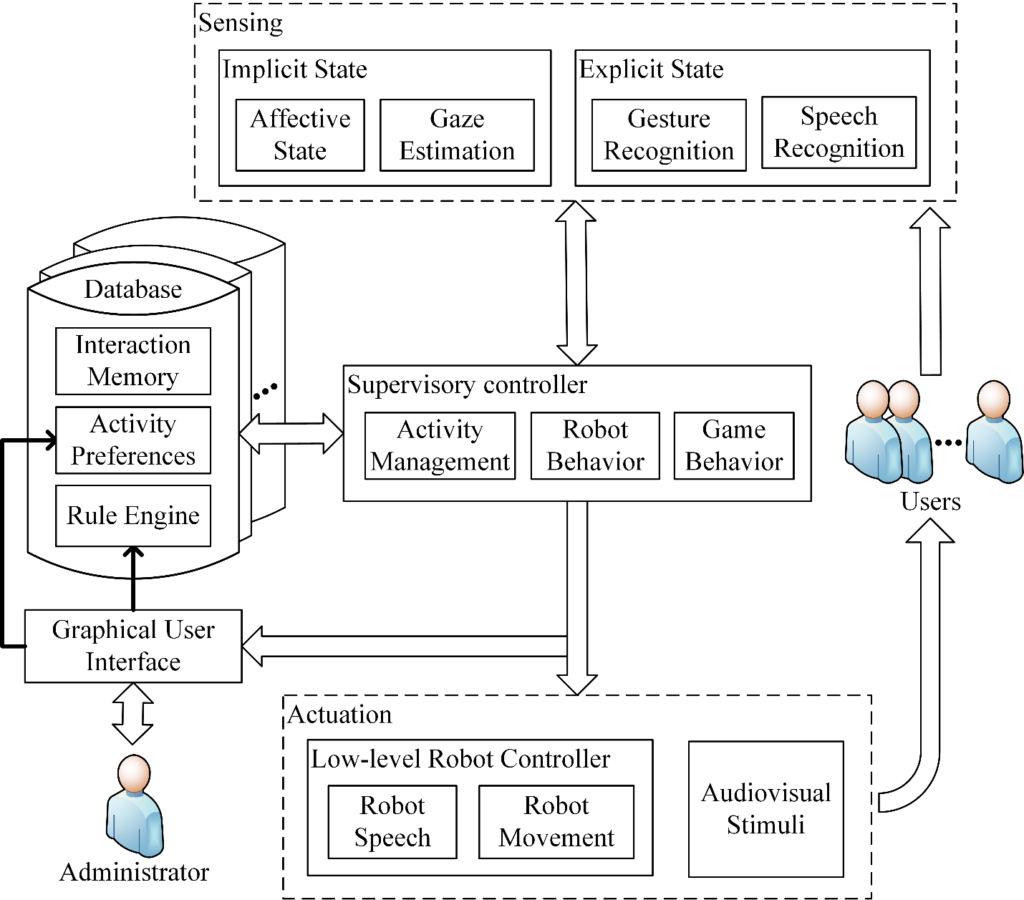
We focus on the design, refinement, and testing of a RObotic Coach ARchitecture for Elder care (ROCARE), which allows effective interaction with one or multiple older adults and achieve long-term engagement for the purpose of maintaining functional abilities as well as socialization. ROCARE is comprised of five modules and is designed based on multi-user engagement models. The engagement models capture the dynamics of human-human interaction (HHI) and human-robot interaction (HRI). Older adults interact with ROCARE through Sensing and Actuation modules. Database module maintains a knowledge base of the older adults to individualize the interaction. Supervisory Controller module estimates the states of HRI and HHI based on engagement models, and generates control policies for dynamic system adaptation. GUI module provides an interface for a human administrator to monitor the interaction.
Different HRI scenarios are developed based on ROCARE: (1) Individual older adult performing multiple activities, including orientation activity, simple math, observing the robot dance to music, a form of the “21 questions” game where the robot guesses the person’s birth state, and joint chair exercises; (2) paired older adults performing a physical activity (“Simon says” game). (3) Individual or paired older adults interacting with a robotic platform that consists of a robot and a virtual reality game environment. In these scenario, electroencephalogram (EEG), head pose estimation of gaze position, and/or physiological signals are collected and analyzed. Older adults’ gestures and movements are detected through a Kinect sensor.
Publications:
- Jing Fan, Dayi Bian, Zhi Zheng, Linda Beuscher, Paul A. Newhouse, Lorraine C. Mion, and Nilanjan Sarkar, “A Robotic Coach Architecture for Elder Care (ROCARE) Based on Multi-user Engagement Models,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2016. [http://ieeexplore.ieee.org/document/7565740/]
- Jing Fan, Linda Beuscher, Paul A. Newhouse, Lorraine C. Mion, and Nilanjan Sarkar, “A robotic coach architecture for multi-user human-robot interaction (RAMU) with the elderly and cognitively impaired,” in Robot and Human Interactive Communication (RO-MAN), 2016 25th IEEE International Symposium on, 2016, pp. 445-450: IEEE. [http://ieeexplore.ieee.org/document/7745157/]