Research
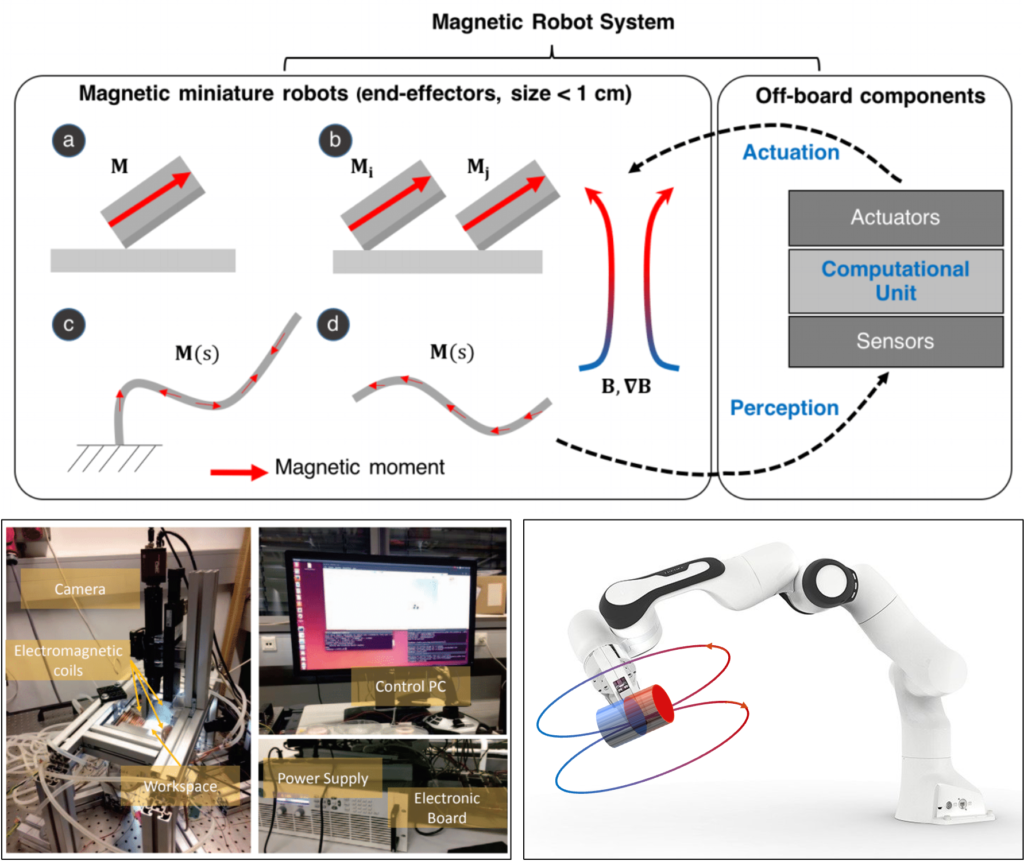
Magnetic Robot System
A magnetic robotic system is consisted of 1) an intelligent magnetic actuation system, such as an electromagnet actuation system or mobile permanent-magnet system, 2) magnetic miniature robots (rigid or soft, single or swarm, tethered or untethered), and 3) a sensing system such as cameras or medical imaging machines.
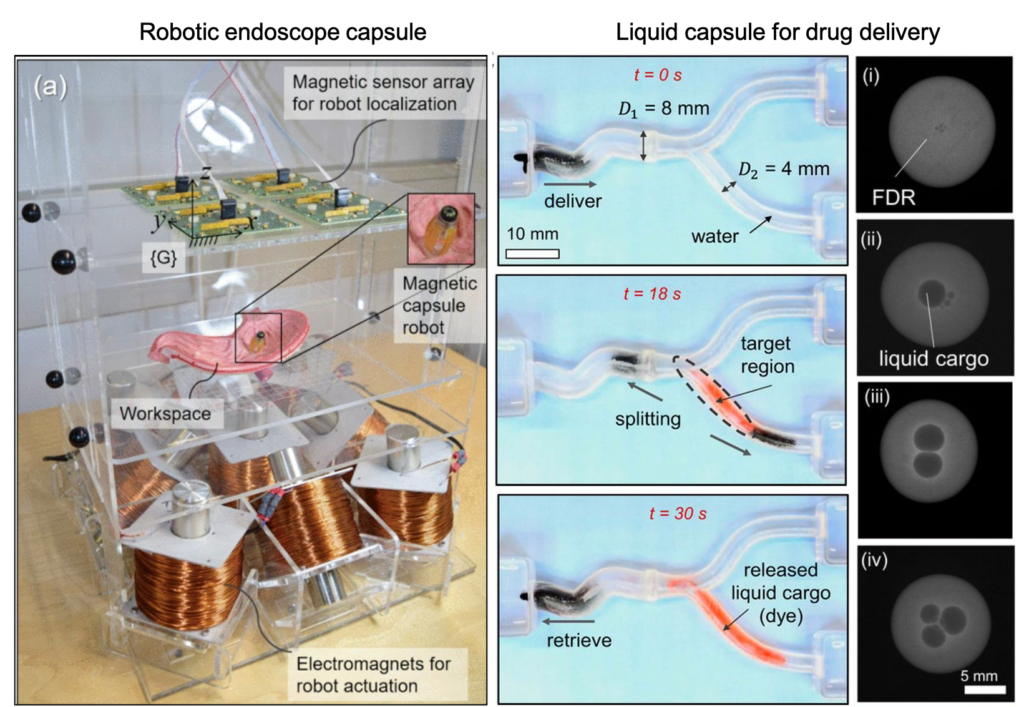
Medical miniature robots
Key words: Droplet robots, drug delivery, robotic capsule endoscopes, magnetic actuation and localization
- Son, D., Dong, X. and Sitti, M., 2018. A simultaneous calibration method for magnetic robot localization and actuation systems. IEEE Transactions on Robotics, 35(2), pp.343-352. link
- Fan, X.#, Dong, X.#, Karacakol, A.C., Xie, H. and Sitti, M., 2020. Reconfigurable multifunctional ferrofluid droplet robots. Proceedings of the National Academy of Sciences, 117(45), pp.27916-27926. Link
Soft climbing medical robots (coming soon)
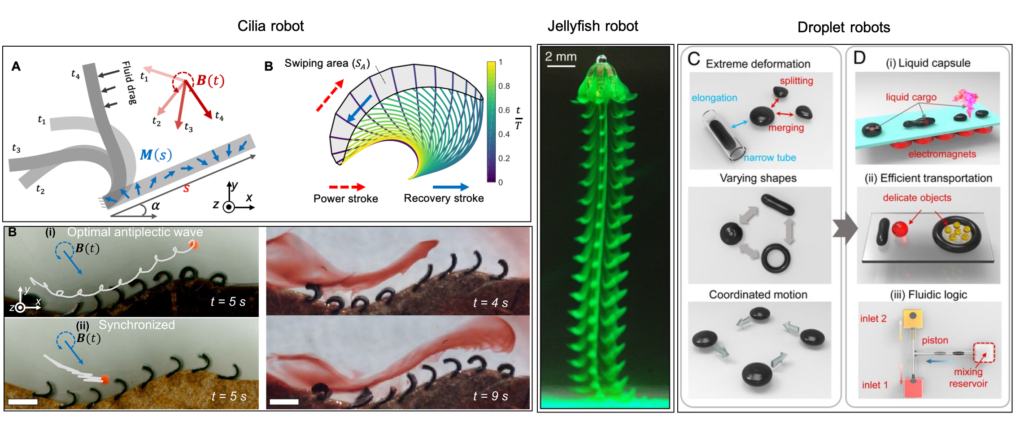
Miniature Soft Robots
Key words: soft robots, bioinspiration, biomechanics, swimming robots, fluidic manipulation
- Dong, X.#, Lum, G.Z.#, Hu, W.#, Zhang, R., Ren, Z., Onck, P.R. and Sitti, M., 2020. Bioinspired cilia arrays with programmable nonreciprocal motion and metachronal coordination. Science advances, 6(45), p.eabc9323. Link
- Lum, G.Z.#, Ye, Z.#, Dong, X.#, Marvi, H., Erin, O., Hu, W. and Sitti, M., 2016. Shape-programmable magnetic soft matter. Proceedings of the National Academy of Sciences, 113(41), pp.E6007-E6015. Link
- Ren, Z.#, Hu, W.#, Dong, X. and Sitti, M., 2019. Multi-functional soft-bodied jellyfish-like swimming. Nature communications, 10(1), pp.1-12. Link
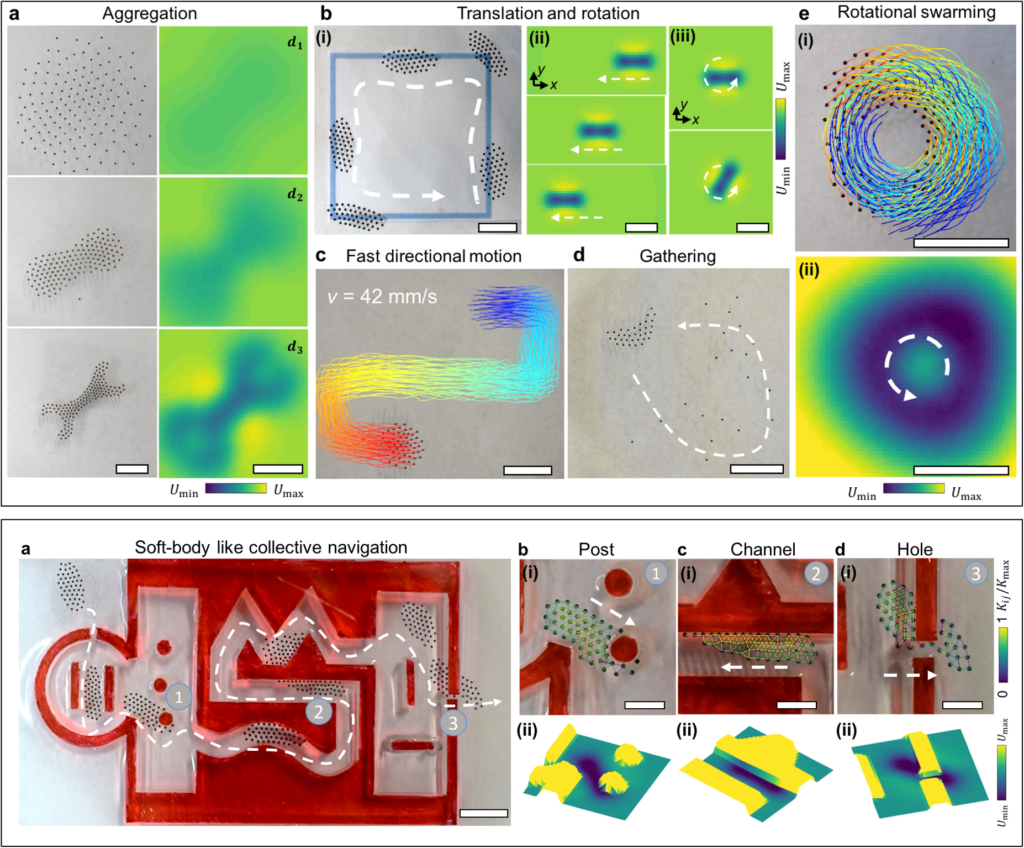
Swarm microrobots
Key words: control, collective motion, cooperative behaviors
- Dong, X. and Sitti, M., 2019. Collective Formation and Cooperative Function of a Magnetic Microrobotic Swarm. In Robotics: Science and Systems. Link
- Dong, X. and Sitti, M., 2020. Controlling two-dimensional collective formation and cooperative behavior of magnetic microrobot swarms. The International Journal of Robotics Research, 39(5), pp.617-638. Link
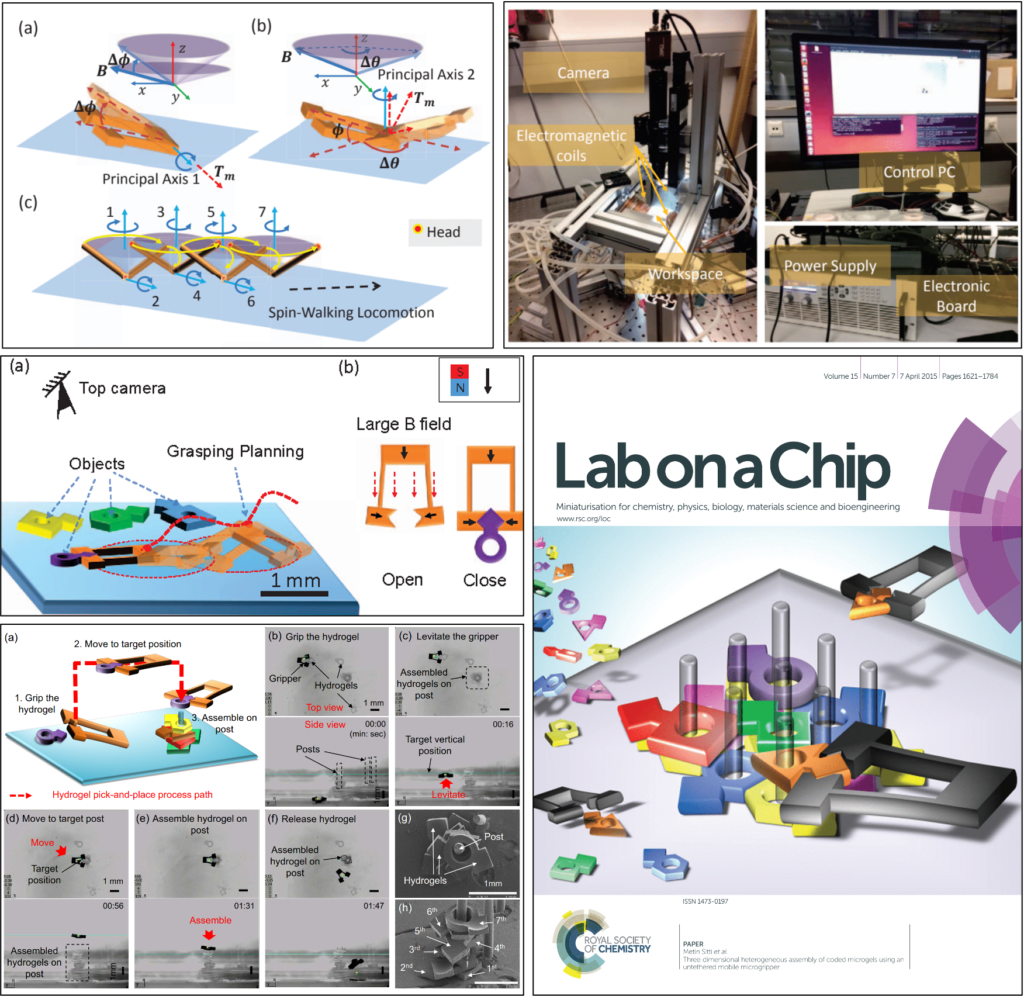
Microrobots for manipulation
Key words: soft microgrippers, control and motion planning, 3D assseembly, tissue engineering
- Chung, S.E.#, Dong, X.# and Sitti, M., 2015. Three-dimensional heterogeneous assembly of coded microgels using an untethered mobile microgripper. Lab on a Chip, 15(7), pp.1667-1676. Link
- Dong, X. and Sitti, M., 2017, May. Planning spin-walking locomotion for automatic grasping of microobjects by an untethered magnetic microgripper. In 2017 IEEE International Conference on Robotics and Automation (ICRA) (pp. 6612-6618). IEEE. Link