Human Augmentation using Variable Stiffness Technology
Recent research has showed that effective human augmentation does not necessitate a powered exoskeleton built to do mechanical work. This has been experimentally demonstrated in zero output work tasks such as walking (Collins, et. al. Nature, 2015), and has been theoretically shown in nonzero output work tasks such as running (Sutrisno & Braun, Science Advances, 2020) and jumping (Sutrisno & Braun, IEEE TNSRE, 2019).
The surprising finding of the latter two works was to show that an exoskeleton which augments the leg with a variable stiffness spring, could enable a human to move faster, and jump higher without supplying energy beyond the energy supplied by the human. This finding suggest that variable stiffness spring actuators provide the core technology for human augmentation.
We investigate novel ways to use variable stiffness springs to augment human motion.
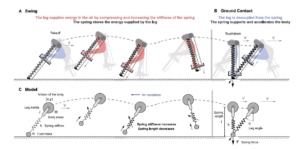
The figure shows an example of a running exoskeleton that uses a variable stiffness spring to enable the human to run 50% faster. The human may supply energy by compressing the spring during flight. The spring later increases its stiffness to support the body weight and accelerate horizontal motion when pushing against the ground.
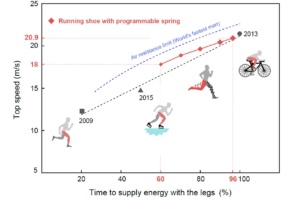
The figure shows the top speed of the proposed variable stiffness running, ice skating, and cycling. The top speed is plotted against the time available for the legs to supply energy in each motion. In natural running the legs only supply energy when touching the ground, which only occurs 20% of the time, and not during flight. Using the variable stiffness spring a human could theoretically supply energy at most 96% of the time during leg swing. Even if the leg could only supply energy only 60% of the time, the exoskeleton could still enable the human to reach 18 m/s, or 50% faster than the top speed of natural running (12.3 m/s) according to our theoretical model.
Video showing a race between the World’s fastest runner (Usain Bolt) using the variable stiffness running exoskeleton versus the 100m sprint world record.
A. Sutrisno and D.J. Braun, How to Run 50% Faster without External Energy, Science Advances, 2020.

Theoretical model of a Variable Stiffness Spring being used to augment jump height. A. Sutrisno and D.J. Braun, Enhancing Mobility with Quasi-passive Variable Stiffness Exoskeletons, IEEE Transactions on Neural Systems & Rehabilitation Engineering, 2019.
Energetically-passive robot exoskeletons, mimicking the function of the bicycle, could enable humans to reach previously unprecedented mobility. However, energetically passive robot exoskeletons require a sophisticated mechanism to enable the human to supply energy. In this work, we present a new type of human-driven compliant transmission mechanism that could enable humans to supply energy when the leg is in the air, store the supplied energy, and release the stored energy when the leg is on the ground, in order to amplify the leg force and power.
T. Zhang and D.J. Braun , Human Driven Compliant Transmission Mechanism , IEEE International Conference on Robotics and Automation, Xi’an, China, 2021.
Theory suggests an inverse relation between the stiffness and the energy storage capacity for linear helical springs: reducing the active length of the spring by 50% increases its stiffness by 100%, but reduces its energy storage capacity by 50%. This relation limits the potential of the variable stiffness actuation technology when it comes to human performance augmentation in natural tasks, e.g., jumping, weight-bearing and running, which may necessitate a spring exoskeleton with large stiffness range and high energy storage capacity. In this paper, we theoretically show that the trade-off between stiffness range and energy storage capacity is not fundamental; it is possible to develop variable stiffness springs with simultaneously increasing stiffness and energy storage capacity.
Sung Y. (Joel) Kim, Tiange Zhang, and David J. Braun, Variable Stiffness Springs for Energy Storage Applications , IEEE International Conference on Robotics and Automation, Paris, France, 2020.
The energy required by a robot to augment the natural capability of a human limb is the energy required to do mechanical work, and the energy required to support the body. Although the latter task does not result in any increase in kinetic energy, experimental studies have shown it to be metabolically expensive to the muscles. Based on this observation, effective human augmentation could be achieved by Variable Stiffness Springs operated in parallel to human joints to support body weight, even if such springs only supplements joint stiffness without doing mechanical work, Braun et al IEEE TRO 2019.
D.J. Braun, V. Chalvet, Chong T.-H., S.S. Apte and N. Hogan, Variable Stiffness Spring Actuators for Low Energy Cost Stiffness Modulation, IEEE Transactions on Robotics, 2019.
H.-F. Lau, A. Sutrisno, T.-H. Chong, D.J. Braun, Stiffness Modulator: A Novel Actuator for Human Augmentation, IEEE International Conference on Robotics and Automation, 2018.