Dr. Braun has received the prestigious NSF CAREER Award
Mar. 9, 2022—This Faculty Early Career Development Program (CAREER) project will create robot exoskeletons that provide the wearer with capabilities beyond those of an unassisted human, to an extent previously thought to require externally powered actuators, such as electric motors or pneumatic cylinders. Unpowered mechanical devices are already used for performance enhancement – a person can travel...

Our recent ICRA presentations are available on our lab YouTube channel
Jun. 11, 2021—YouTube Channel Link: ARC lab
IROS 2020 Workshop: Compliant Actuation for Human Performance Augmentation
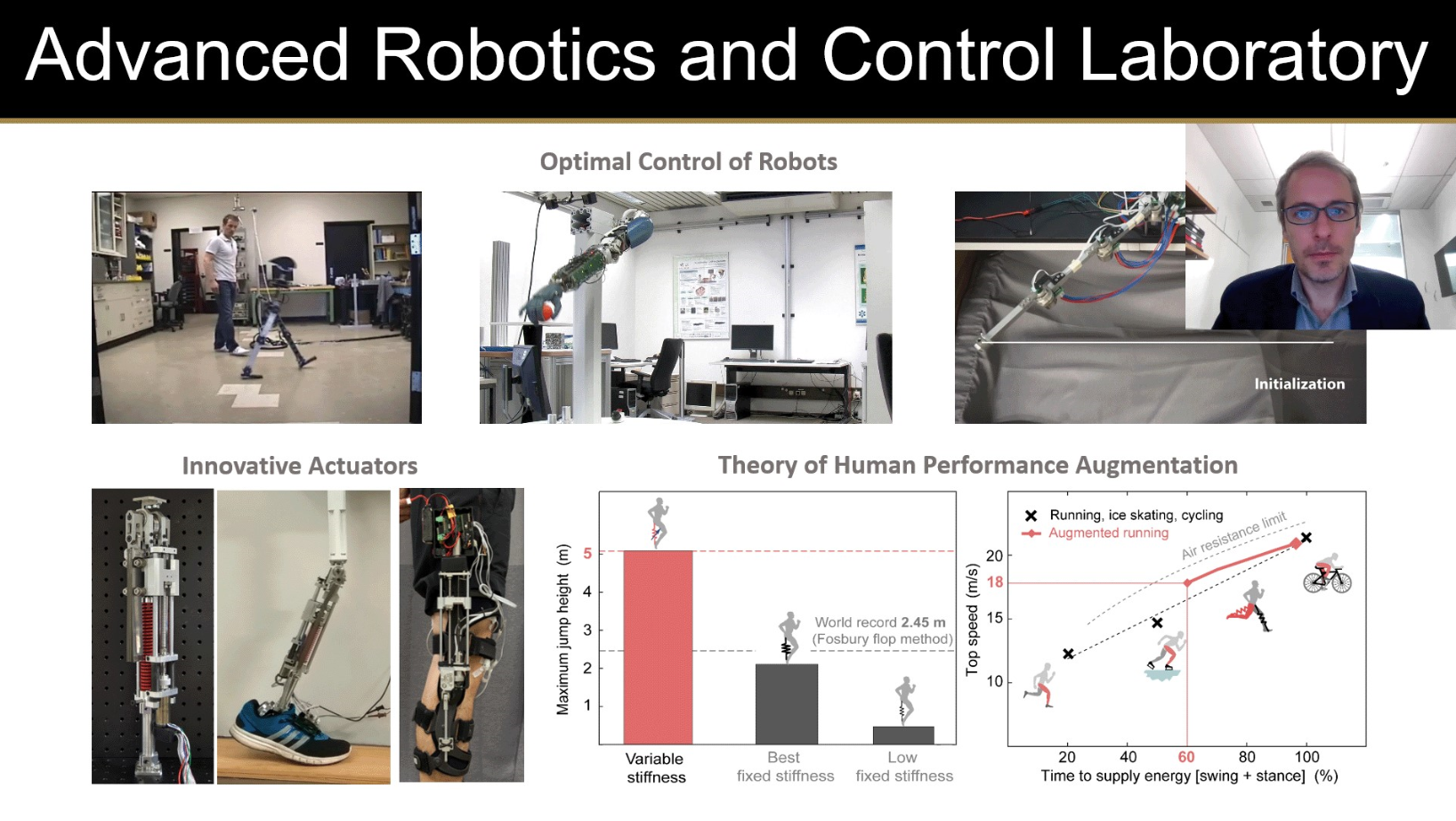
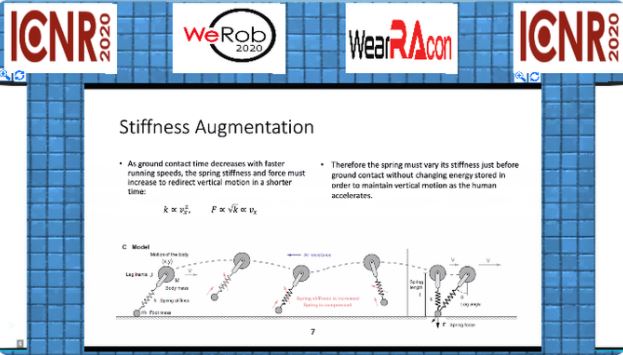
Nov. 23, 2020—One way to imagine human augmentation is to consider an energetically active robot that supplements muscle power with external energy. Another way to imagine human augmentation is to consider solely human-powered energetically passive devices; two examples are bicycles and ice-skates. In this talk, I will discuss the hidden potential of an emerging human-powered compliant actuation...

Our recent work on a theoretical running exoskeleton was featured in the German edition of MIT Technology Review
Nov. 10, 2020—Our work was fortunate to have been mailed a copy of the May 2020 issue of the German language print edition of MIT Technology Review: Our recent work on the theoretical potential of passive exoskeletons for faster running was featured in page 20 of the News section, bottom paragraph. German Title: “Schneller dank Sprungfedern”, English...
Invited Talk: “The Hidden Potential of Energetically Passive Exoskeletons” at WeRob2020
Oct. 16, 2020—The International Symposium on Wearable Robotics (WeRob2020) is a conference where for researchers and innovators to showcase and discuss new technologies and solutions in wearable robotics. The symposium features talks and discussions supporting solutions for healthy ageing, advanced therapeutic treatments of neurological diseases, space applications or assistive technologies in the industry. Amanda was invited to present...

New NSF (CMMI/DCSD) Award: What if robots could teach robots the same way parents teach their children?
Aug. 18, 2020—This project introduces learner-helper robot pairs to enable the learner robot to use physical experimentation to improve its performance on repetitive task, without accurate analytical or numerical models. This project introduces learner-helper robot pairs to enable the learner robot to use physical experimentation to improve its performance on repetitive task, without accurate analytical or numerical...

Our Paper “How to Run 50% Faster without External Energy” is publicized in The Guardian, The Conversation, etc.
May. 15, 2020—Link to Original Article(open access): https://advances.sciencemag.org/content/6/13/eaay1950 Newspaper Publications: The Guardian: https://www.theguardian.com/science/2020/mar/26/spring-heeled-concept-that-could-see-usain-bolt-rocket-to-50mph The Conversation: https://theconversation.com/robo-boot-concept-promises-50-faster-running-134105 ScienceAlert: https://www.sciencealert.com/using-a-catapult-like-exoskeleton-could-get-us-running-50-percent-faster NewScientist: https://www.newscientist.com/article/2238609-spring-powered-shoes-could-help-us-run-more-than-50-per-cent-faster/ Inverse: https://www.inverse.com/mind-body/extremely-steampunk-leg-attachments-could-let-humans-run-46-miles-per-hour