Our Paper, “How to Run 50% Faster without External Energy”, is accepted in Science Advances
Humans have constantly tried to run faster since the earliest Olympic Games (c. 776 BC), featuring the Stade, a footrace around a stadium. As records become broken and next-generation running shoes are developed, this begs the question – what is the speed limit? Recently, researchers in the ARCLab have proposed a special type of running shoe that enables a human to run 50% faster, a super shoe that would allow the world’s fastest man to reach 18 m/s as opposed to 12.3m/s with current running shoes (Sutrisno & Braun, Science Advances, 6, eaay1950, 2020).
This work is also featured in:
- “Spring-heeled: concept that could see Usain Bolt rocket to 50mph” | The Guardian
- “This Catapult-Like Exoskeleton Contraption Could Make Humans Run 50% Faster” | Science Alert
- “Spring-powered shoes could help us run more than 50 percent faster” | New Scientist
- “Extremely Steampunk Leg Springs Could Let Humans Run 46 Miles per Hour” | Inverse
- “A Spring in Your Step?” | Cosmos Magazine (Royal Institution of Australia)
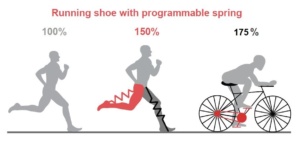
How can a bicycle, which adds weight to a human(12kg) and supplies no external energy, allow a human to move at 75% faster than running? Moreover, how can a bicycle do this when traditional running shoes or even battery-powered exoskeletons are yet to succeed? Using theoretical analysis, professor David Braun and his student Amanda Sutrisno found that the bicycle is fundamentally faster than any running shoe partly because:
- wheels support the body weight.
- wheels allow the legs avoid energy losses from the feet contacting the ground.
- pedals enable the legs to continuously supply energy in mid-air.
In contrast, in running the legs can only supply energy when pushing against the ground but not when the leg is swinging in the air. The researchers realized that this disparity between running mechanics and bicycle mechanics makes the legs able to supply energy 100% of the time in cycling but only 20% of the time in natural running.
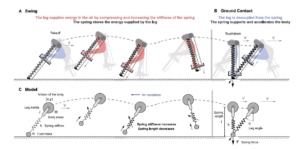
Learning from the bicycle, we invented a method for the legs to supply energy during swing to emulate the function of the pedals in cycling. In the proposed running shoe, the legs supply energy during swing by compressing a spring, which later releases its stored energy on the ground to power forward motion. The running shoe also requires a special type of spring, i.e one that is capable of changing its stiffness, such that the spring can exert greater forces against the ground without changing its stored energy. This novel approach to superhuman augmentation is necessary to support the body weight, redirect vertical motion, and increase the running speed, all within the short ground contact time during high speed running.
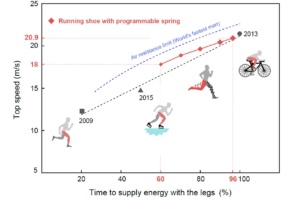
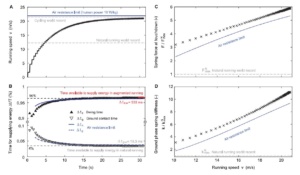
From simulations, it was found that an ideal running shoe would allow the fastest man on earth to use their legs 96% of the step time to reach 20.9m/s forward speed. This speed is comparable to the top speed of cycling, 21.4m/s. We also found that a practical running shoe that could only allow the fastest man on earth to use their legs 60% of the step time would still lead to 18m/stop speed, which is significantly higher than the current 12.3m/s in 100-m sprint. This result shows that the limit of human performance has not been reached and motivates new research in developing shoes that could enable superhuman performance.
Prior exoskeleton research has sought to reduce metabolic energy cost, either using battery power to replace energy otherwise supplied by the human (Kim et al., Science 365, 668-672 2019), or using springs to exert force at no energy cost (Collins et al., Nature 522, 212-215 2015). Instead of reducing metabolic energy cost, we develop “programmable springs” as transmission mechanisms to allow humans to supply energy more often and more efficiently (Braun et al., IEEE T-Ro 35(6), 1435-1449 2019), instead of using batteries to supply additional energy. This approach could be extended to other forms of human performance augmentation aside from running (Sutrisno & Braun, IEEE TNSRE 27(3), 487-496 2019). Programmable springs, or more commonly, “Variable Stiffness Springs”, are an emerging technology in robotics, in which the passive force a spring is able to exert for the same deflection can be changed depending on the situation. Variable stiffness springs is an active field of research of the ARCLab, and we have developed several variable stiffness spring mechanisms and performed theoretical analysis on their performance limits
When exoskeletons use energy from the human to enable superhuman performance, it would result in lower weight as there is no need to carry battery packs. This increase in portability could enable more widespread adoption of human augmentation, and push the boundaries of sports, law enforcement, and search and rescue capabilities. Imagine if soccer players could all run 50% faster, would tactics in the game have to adapt to a sudden technological boost in running shoes? What if firefighters could run 50% faster, would there be fewer casualties as it would be easier to escape the spread of forest fires? Would faster running shoes enable paramedics to behave like superman getting patients to the ambulance 50% faster?
These questions are currently unanswered as a prototype is still underway. However, for now using theory the researchers were able to understand the fundamental requirements of next generation running shoes, and in far less time than repeating the bicycle’s 150 year trial and error development.